ItomSharedSemaphore¶
In itom different main components are executed in different threads.
Note
What is a thread
In a modern operating system, different programs can run simultaneously. Then, every program is executed in its own process and the operating system is responsible such that each process continuously gets some processing-time on the processor. If your computer has multiple processors, than the operating system can assign processing time of different processes to different processing units.
Every program itself can now run different components of its own software in different threads. Thread are comparable to processes on operating system level, however threads can share memory, such that every thread can have access to a common set of global variables, instances... The advantage is, that a thread can execute a time-consuming calculation while the other thread is responsible for the graphical user interfaces, which now is not blocked while the calculation thread is working.
For more information about threads see Wikipedia (english) or Wikipedia (german)
In itom, the following components run into a different thread:
- Main programm including all graphical user interface components (this is a restricting of windows operating systems). This thread is called “main thread”.
- Python scripting engine. All python scripts are executed in a second thread. Therefore you should not directly use any 3rd-party python modules which open any graphical user interface (like PyQt, tkInter ...).
- Every DataIO or Actuator-plugin is executed in its own thread. Every algorithm is executed in the thread of the calling instance (e.g. main thread or python thread). All widgets provided by any Algo-plugin are always executed in the main thread (see restricting of point 1).
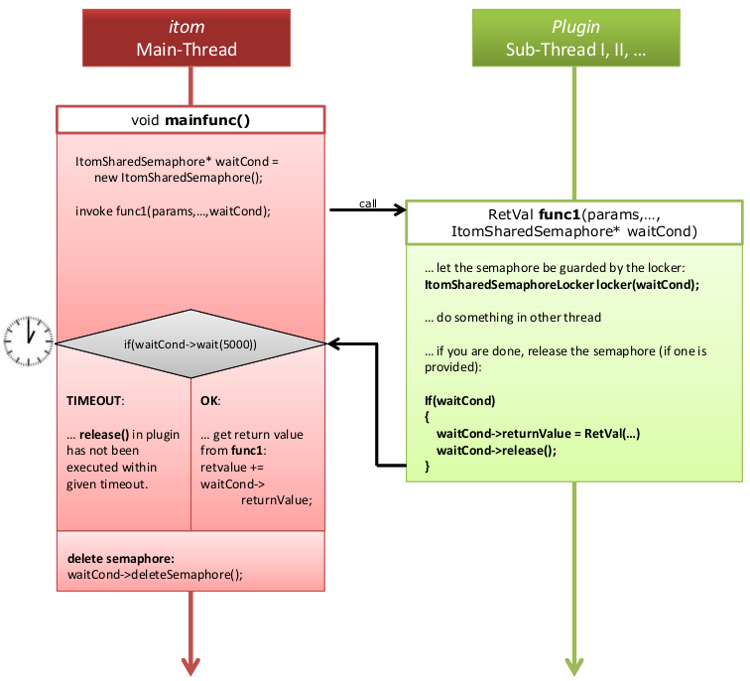
Figure: Scheme of a communication between itom (main thread) and any plugin-method (plugin is running in another thread)
In figure Figure: Scheme of a communication between itom (main thread) and any plugin-method (plugin is running in another thread), a common communcation between a method mainfunc which is executed in itom‘s main thread (e.g. in AddInManager and another method func1 of a plugin is depicted. The plugin is of type actuator or dataIO and therefore runs in its own thread. mainfunc is calling the method func1. Usually the calling method has to wait until the called method (func1) has been finished (or until the most important parts of func1 have been executed). In order to consider cases where the plugin-method is not answering within a certain timeout, itom has integrated a mechanism such that the waiting-process in the main-function can be stopped after that the timeout time expired. This mechanism is realized by the class ItomSharedSemaphore, which is definined in the file sharedStructuresQt.h (folder common).
ItomSharedSemaphore consists of the following elements:
- QSemaphore *m_pSemaphore¶
ItomSharedSemaphore internally contains an instance of QSemaphore, the platform independent semaphore provided by Qt. A semaphore can been considered as set of gaming piece. Any method executed within different threads can take one or more gaming pieces from the common semaphore. If there are not enough gaming piece in the storage, the method has to wait until the necessary number of gaming pieces become available. Any method which exits some “critical sections” in the code release their previously picked gaming pieces, such that other instances can repick them. In most cases in the communcation between itom and a plugin-method, the semaphore contains one gaming piece, since only two partners are participating in the communication: the method in the main thread and the called method in the plugin-thread. The method in the plugin-thread is picking the gaming piece and the calling method has to wait until the gaming piece gets back to the storage of the semaphore. This is achieved by releasing the gaming piece in the called method.
- int m_numOfListeners¶
This is the number of participants at a communcation process (without the calling method). Usually only one method is called, therefore this value is usually equal to 1. This value usually is automatically set.
- int m_instCounter¶
This value indicates how many gaming pieces are out of the storage. If the called method is still executing, this value is equal to one. If the called method already release the semaphore, hence gaming piece, the value drops to zero.
- bool isCallerStillWaiting¶
This method returns true if the calling method (here: the method in main thread) is still waiting that the called method has released the semaphore, else the method returns false.
- ito::RetVal returnValue¶
The called method in the plugin-thread can set that globally accessible return value and the calling method can read its value. That return value is the single way to return the success or error message to the calling method, since no return value of the called method (slot) can directly be returned.
Scheme of the inter-thread communication¶
The calling method mainfunc creates an instance of ItomSharedSemaphore:
ItomSharedSemaphore *waitCond = new ItomSharedSemaphore();
Method func1 is called in the plugin-thread. This can only be done if func1 is declared as slot (signal-slot-system of Qt). The call is executed using the method invokeMethod of QMetaObject:
QMetaObject::invokeMethod(instance-of-plugin,"func1",Q_ARG(paramType1, paramValue1),...,Q_ARG(ItomSharedSemaphore*,waitCond))
For the use of the macros Q_ARG and the method invokeMethod, see also the documentation of Qt.
Then func1 is executing and their last parameter waitCond contains the pointer to the instance of ItomSharedSemaphore.
If func1 has been finished, you should write the return value to the instance of waitCond and release the semaphore, hence, return the gaming piece to the global storage of the semaphore:
if(waitCond) //can also be NULL, therefore check it { waitCond->returnValue = ito::RetVal(ito::retOk) waitCond->release() }
The caller has to wait until the semaphore has been released or a timeout expired. This is done by the member wait of ItomSharedSemaphore. The single argument of that method is the timeout in milliseconds. Usually you can use the global variable PLUGINWAIT, which is set to 5 seconds. The wait-method returns true if the semaphore has been released within the timeout, else it returns false:
if(!waitCond->wait(PLUGINWAIT)) { //timeout occurred }
Finally all participants at the communcation process (here: caller and called method) have to delete the semaphore. Be careful: This can not be done by simply deleting the pointer to waitCond. Instead both the caller and the called method have to execute the following command, hence, call the method deleteSemaphore of the semaphore pointer:
waitCond->deleteSemaphore()
After that the last participant at the communcation process deleted the semaphore, it is really deleted by itom. Then you don’t have access to the semaphore any more, hence, you also don’t have access to the internal return value.
In order to simplify the process of deleting the semaphore, both the caller and the calling method can also create a variable of type ItomSharedSemaphoreLocker, where the pointer to waitCond has to be given as constructor-argument. If this variable finally is destroyed, which is automatically done if the method is finished - even after that the return command has been executed - it calles the deleteSemaphore-method of ItomSharedSemaphore with waitCond as argument.
Then the scheme of the caller is:
ItomSharedSemaphoreLocker locker(new ItomSharedSemaphore())
QMetaObject::invokeMethod(plugin-instance,"func1",Q_ARG(paramType1,paramValue1),...,Q_ARG(ItomSharedSemaphore*, locker.getSemaphore())
if(!locker.getSemaphore()->wait(PLUGINWAIT))
{
//timeout
retvalue += ito::RetVal(ito::retError,0,"timeout while executing method");
}
else
{
retvalue += locker.getSemaphore()->returnValue;
}
and the scheme of the called method func1 is:
void func1(type1 param1, ..., ItomSharedSemaphore* waitCond)
{
ItomSharedSemaphoreLocker locker(waitCond)
... do some calculation ...
if(waitCond)
{
waitCond->returnValue = ito::retOk;
waitCond->release();
}
return
}
Note
For more information about the implementation of class ItomSharedSemaphore see ItomSharedSemaphore - Reference or the doxygen documentation for itom.